Reachy
Dans le cadre du projet Reachy Mobile le robot Reachy a deux objectifs principaux. Détecter les utilisateurs voulant interagir avec lui et proposer des interactions avec eux. Il doit aussi communiquer avec la base mobile Ezwheel pour donner les ordres de déplacement.
Concernant les interactions avec les utilisateurs, le robot Reachy est principalement capable de jouer au Tictactoe, il peut aussi émettre des bruits et utiliser ses antennes pour transmettre des émotions. Pour la reconnaissance d'utilisateurs vouant jouer avec lui le réseau PoseNet est utilisé, permettant de détecter les squelettes des personnes passant devant ses caméras.
Le Reachy est capable de se déplacer en étant fixé sur la base mobile Ezwheel via une plaque et un tube d'Alluminium.
Lancement du projet
Pour lancer le projet commencez par allumer la base mobile puis le Reachy, connectez vous au Wifi de la base mobile dont
le mot de passe est swd_starterkit, puis allez à l'adresse http://10.10.0.1:8000 vous accederez à la page d'accueil
du projet
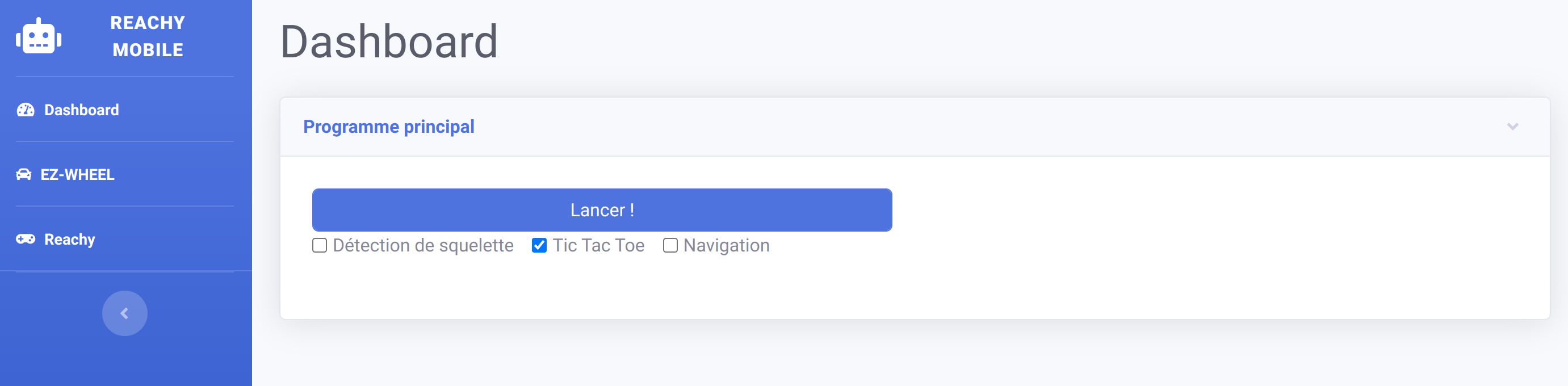
Depuis cette page vous pouvez contrôler les différentes composantes du projet et lancer les différents scénarios, voir la documentation de l'API pour plus d'informations.